



研究の概要
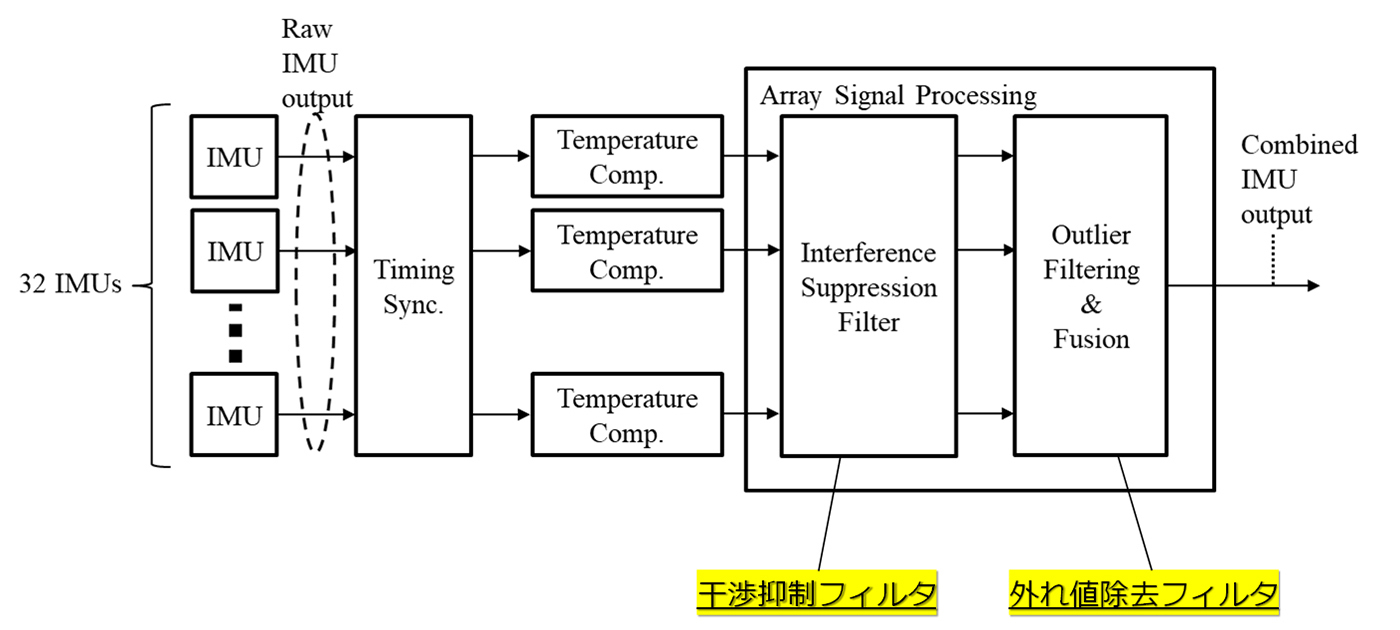
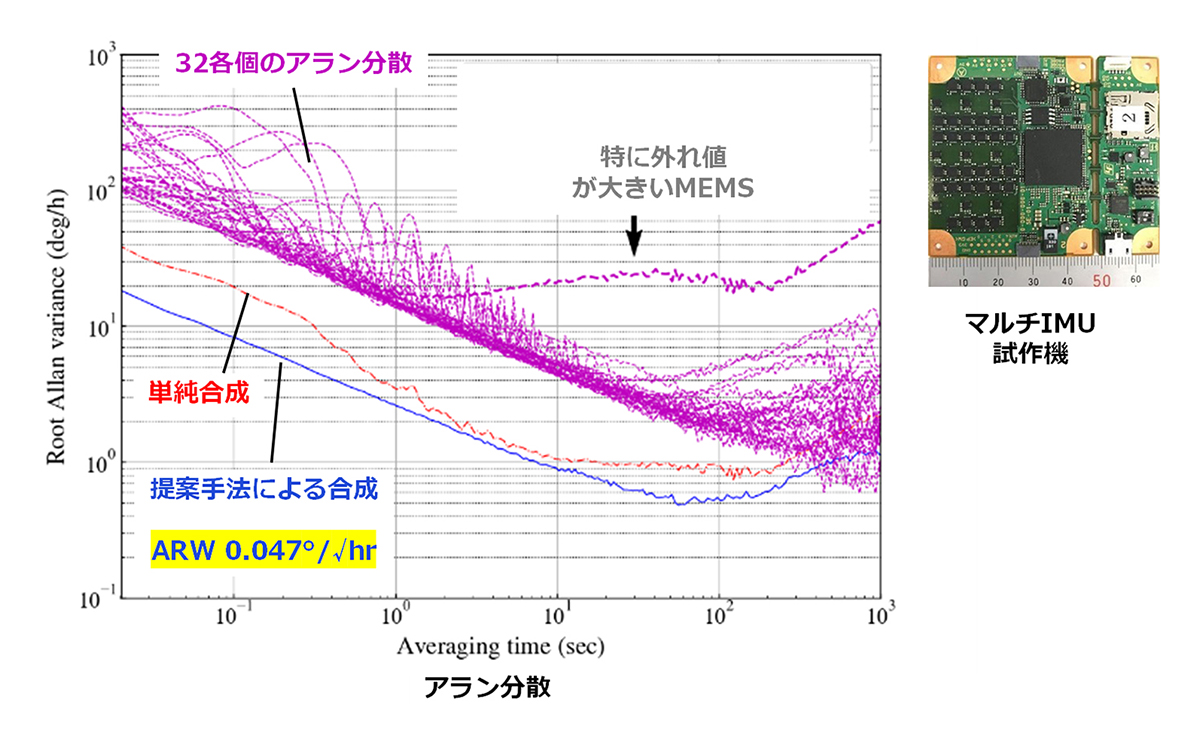
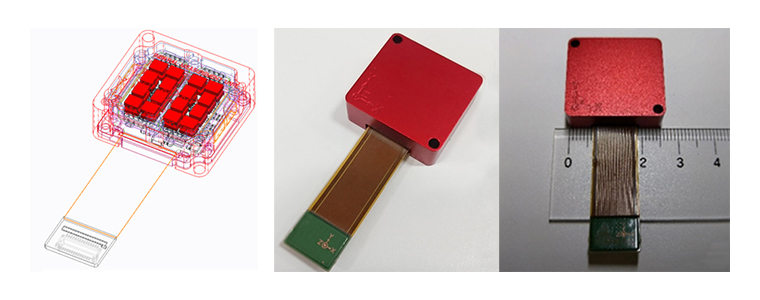
MEMS-IMU素子32個をアレー状に配置し、32個出力信号合成時に干渉抑制フィルタ及び外れ値除去フィルタを挿入することで、MEMS個体選別を行う必要なく、大数法則(√32分の1)に近いノイズ精度(統計的理想 0.042°/√hr)及び、バイアス安定性:0.5°/hrのIMUを実現することに成功しました。
研究実績
発表論文
- H. Kamata, M. Kimishima, T. Sawada, Y. Suga, H. Takeda, K. Yamashita, and S. Mitani, MEMS Gyro Array Employing Array Signal Processing for Interference and Outlier Suppression, IEEE Inertial 2020, Hiroshima, Japan