



RACS2 Bridgeとは
RACS2 Bridgeは、地上ロボティクスの標準プラットフォームであり、地上ロボット開発において広く使われるROS2と、米国航空宇宙局(NASA)などで宇宙ミッションに使用された実績のある制御フレームワークcFSを接続し、それぞれの特長を活かすためのソフトウェアです。ROS2は様々なライブラリ群やツール群を備えておりモジュール化が容易で、開発の柔軟性に優れる一方、cFSは宇宙機の厳しい環境下で安定して動く高信頼設計が特長です。
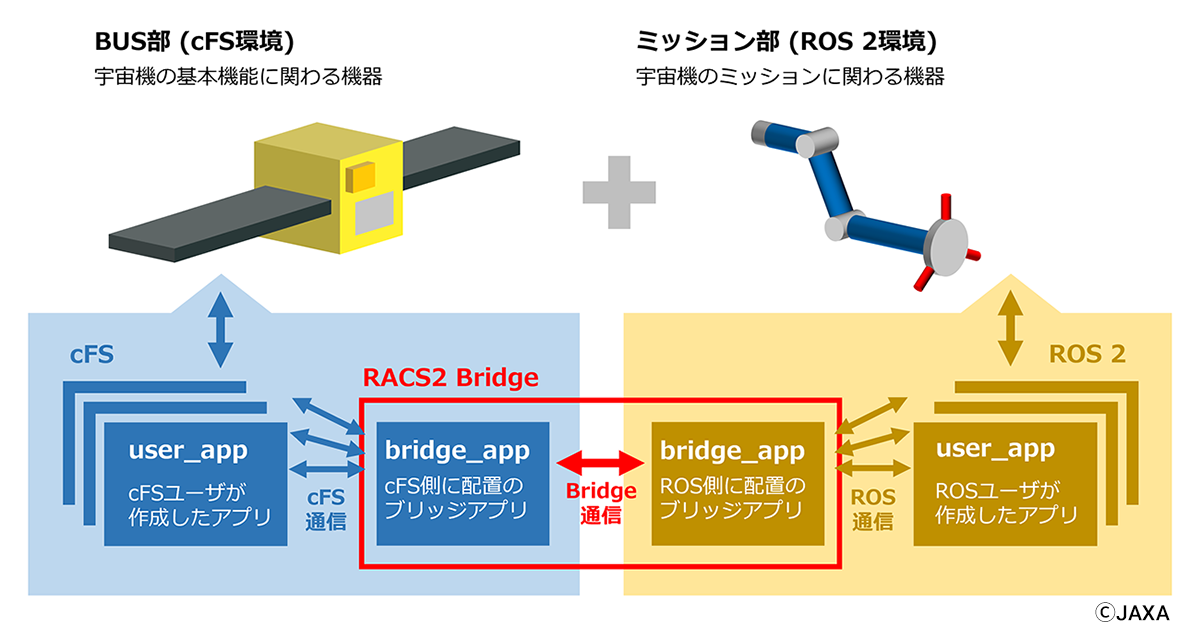
* 本図中のcFS関連部分はNASA開発のcFS(脚注)を参考に作成(出典:NASA)
RACS2 Bridgeは、ROS2のトピック通信とcFSのメッセージ構造を相互に変換する「メッセージ・ブリッジ」として機能し、Apache 2.0ライセンスの下でGitHubに公開されています。教育用のサンプルや通信構成も含まれており、研究者や学生をはじめ、開発コミュニティ全体への門戸を広げています。
さらに、RACS2 Bridgeは単なるソフトウェア接続にとどまらず、「将来的にはROS2に対応した宇宙ロボット向けハードウェア設計まで含む共通プラットフォーム」への進化を目指しており、OSSを通じた産学連携の強化を視野に入れています。
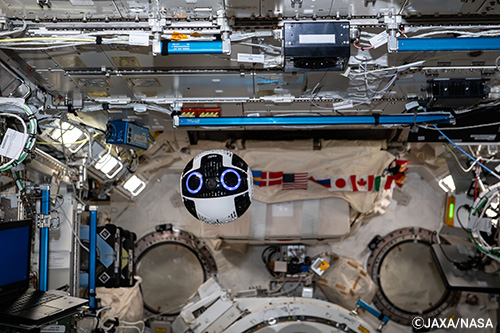
実証実験の内容
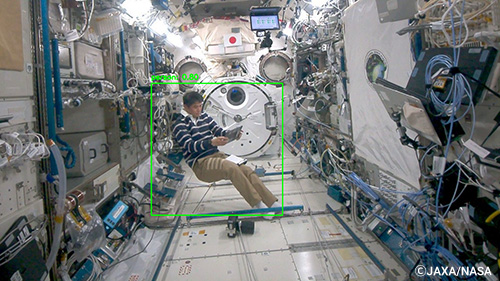
ISS内の「Int-Ball2」の技術実証プラットフォームにRACS2 Bridgeを搭載し、ROS2上で動作する物体認識AI「MobileNet」を利用して宇宙飛行士を「Person」、としてリアルタイムに識別しました。そのデータはcFS側へ送信され、ROS2ベースの高度なAI処理とcFSのリアルタイム制御が、軌道上環境でも正常に連携動作することを実証しました。
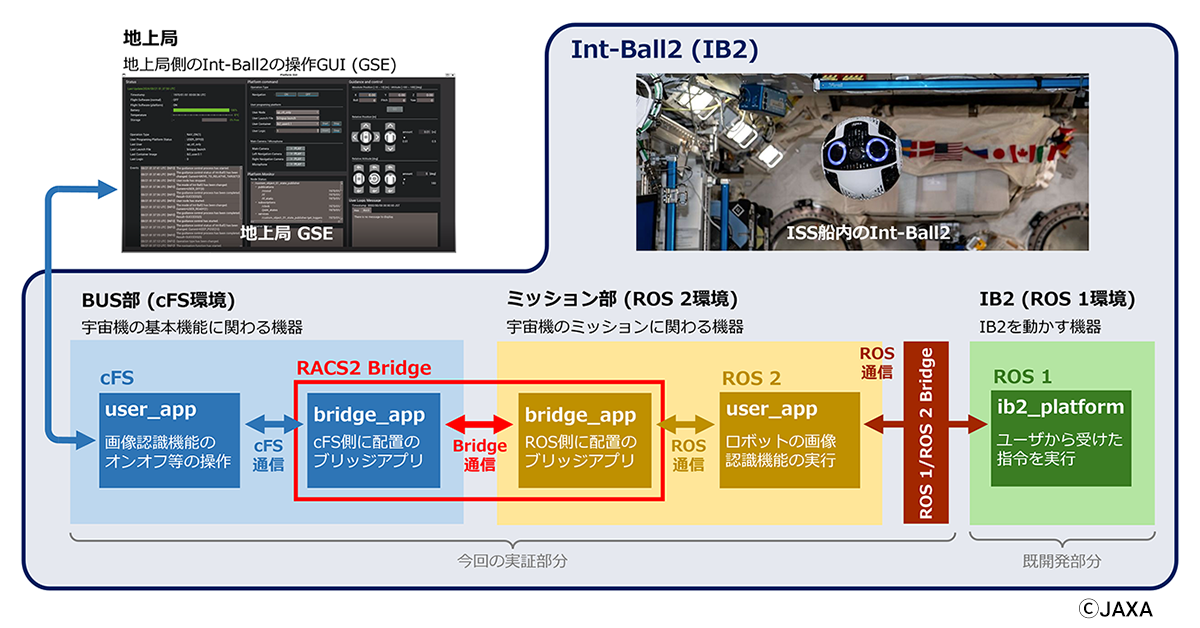
* Int-Ball2ソフトウェアは制御部を中心にROS 1が使用されており、ROS1-ROS2間をROS Bridgeで通信を行いました。
* 本図中のcFS関連部分はNASA開発のcFS(脚注)を参考に作成(出典:NASA)
今後の展望
今回の成果を踏まえ、今後はソフトウェアを含んだ宇宙機システムの開発環境の整備を進める計画です。また、教育分野にも広がるOSS基盤として、世界中の開発者が参加できるプラットフォームへと成長し、宇宙ロボティクスの発展に貢献していきます。
Space ROSプロジェクトとの関係
Space ROS(*6)は、米国PickNik Robotics社がNASAの支援の下進めているROSそのものを宇宙仕様にすることを目的にするオープンソースプロジェクトです。RACS2 Bridgeプロジェクトは、このSpace ROSに対してもPull Requestを通じて提案を行い、参加しています。両プロジェクトはお互いに補完し合う協力関係にあります。
参考
- (*1) RACS2 (RACS2 and cFS System) Bridge: Github公開ソースコード
- (*2) Int-Ball2: 研究開発部門WEBニュース「Int-Ball2自律飛行と自動ドッキング実証実験に成功」
- (*3) Int-Ball2技術実証プラットフォーム機能: 有人部門WEBニュース「宇宙で活躍する自律カメラロボット「Int-Ball2」、新たな機能拡張プラットフォームを軌道上で実証完了」
- (*4)ROS2(Robot Operating System 2): ROS公式ページ
- (*5) cFS(core Flight System): Github公開ソースコード
- (*6) Space ROS: Github公開ソースコード
関連リンク
- RACS2 Extended DDS(ROS2 と cFS を DDS 層で接続)
- JAXA関連Githubリポジトリ一覧(RACS2 Bridge や Int-ball2_simulator など)
参考文献
- 1. Hiroki Kato (JAXA) and Tatsuhiko Saito (Systems Engineering Consultants (SEC)). “RACS2: the ROS2 and cFS System, launched” Flight Software Workshop 2023, Pasadena, CA, U.S.A.
- 2. 池田勇輝, 西下敦青, 加藤裕基, 巳谷真司 (JAXA), "宇宙機・宇宙ロボット向けのオープンソースプラットフォーム「Space ROS」開発への取り組み," 宇宙科学技術連合講演会68 (2025) , 姫路市
- 3. 池田勇輝, 西下敦青, 加藤裕基 (JAXA), "JAXAにおける宇宙機開発へのROS活用とSpace ROS開発", ROSCon JP 2024, 東京.