



研究の概要
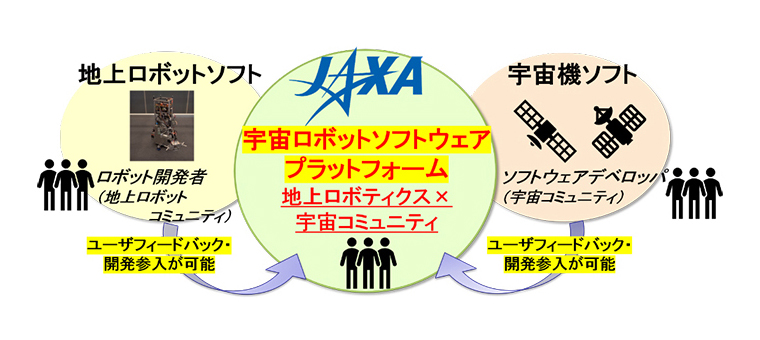
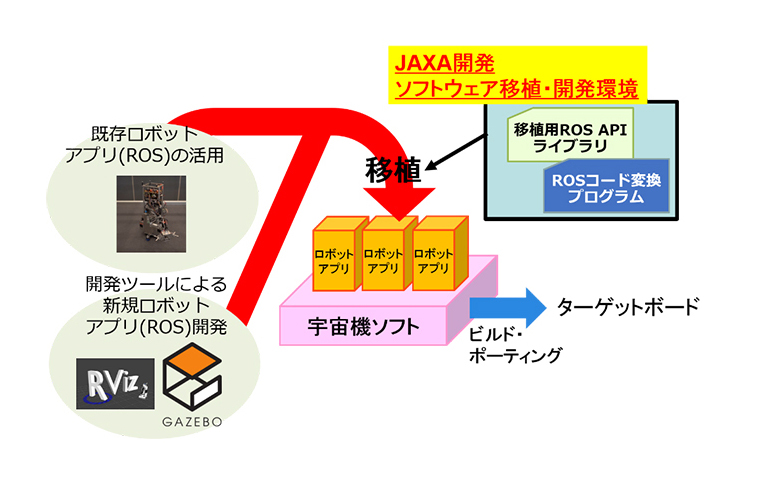
我々は、地上ロボットアプリケーション*のコードを直接取り込んで、宇宙機用アプリケーション**として移植できる環境を開発しました(下図)。これにより、既存のロボットで利用実績のあるアプリケーションの移植や、3次元可視化ツールといった開発ツールを利用した新規アプリケーション開発が可能となります。
ロボットアプリケーションが移植された宇宙機ソフトウェアは、そのままターゲットボードに組み込むことも可能となり、高いソフトウェア開発効率を実現できます。
Robot Operating System(ROS)ノードを、NASAが提供するCore Flight System(cFE)に実装するためのライブラリおよびツール群を公開しています。
ROS/cFE変換ライブラリ
- *
- :地上ロボットソフトウェア基盤ROS(Robot Operating System)において開発されたアプリケーション
- **
- :宇宙機用基盤ソフトウェアcFE(core Flight Executive)上で動作するアプリケーション
研究実績
発表論文
- T.Saito, H.Kato, D.Hirano, K.Iwabuchi, S.Kawaguchi, "cfe Extension for the Use of ROS Applications in the Space Missions", in Proceedings of International Symposium on Artificial Intelligence, Robotics, and Automation in Space (i-SAIRAS), Madrid, 2018.
- 斎藤達彦, 加藤裕基, 平野大地, 岩渕甲誠, 川口仁, "宇宙機上でのROSアプリケーションの利用に向けて", ロボティクス・メカトロニクス講演会, 2018
- Hiroki Kato, Tatsuhiko Saito, Shinobu Kawaguchi, “Software Framework for ROS Implementation into cFS,” in Flight Software Workshop, Huntsville, 2019.