



研究の概要
スペースデブリを除去するにあたり、デブリへの安全かつ確実なランデブ(接近)技術が必要となります。JAXAでは、宇宙ステーション補給船「こうのとり」の開発を通じて、宇宙空間を飛行するターゲットに対するランデブ技術を培ってきました。 デブリへの接近にも、これらの技術を応用して用いることができます。
しかし、デブリ特有の技術課題も多くあります。宇宙ステーションはランデブされることを前提に、いくつものレーザリフレクタや通信機器が取り付けられており、姿勢も制御されているため、ランデブするにあたって有利な条件が整っていました。これに対し、デブリは運用を終了し人工衛星やロケットであるため、接近する際の助けとなるレーザリフレクタや通信機はなく、また、姿勢制御能力も失われています。そのため、デブリの正確な位置や姿勢を確実に計測すること(航法技術)に、技術課題があります。また、デブリを捕獲する宇宙機は、回転しているデブリに接近し、それを捕獲する必要がありますが、これは静止している物体を対象とするのと比較して、大変困難な作業です(誘導技術、制御技術、捕獲技術)。JAXAでは、これらの技術課題を解決するために、研究を進めています。
まず、航法・誘導・制御技術の課題については、2つのアプローチで研究に取り組んでいます。
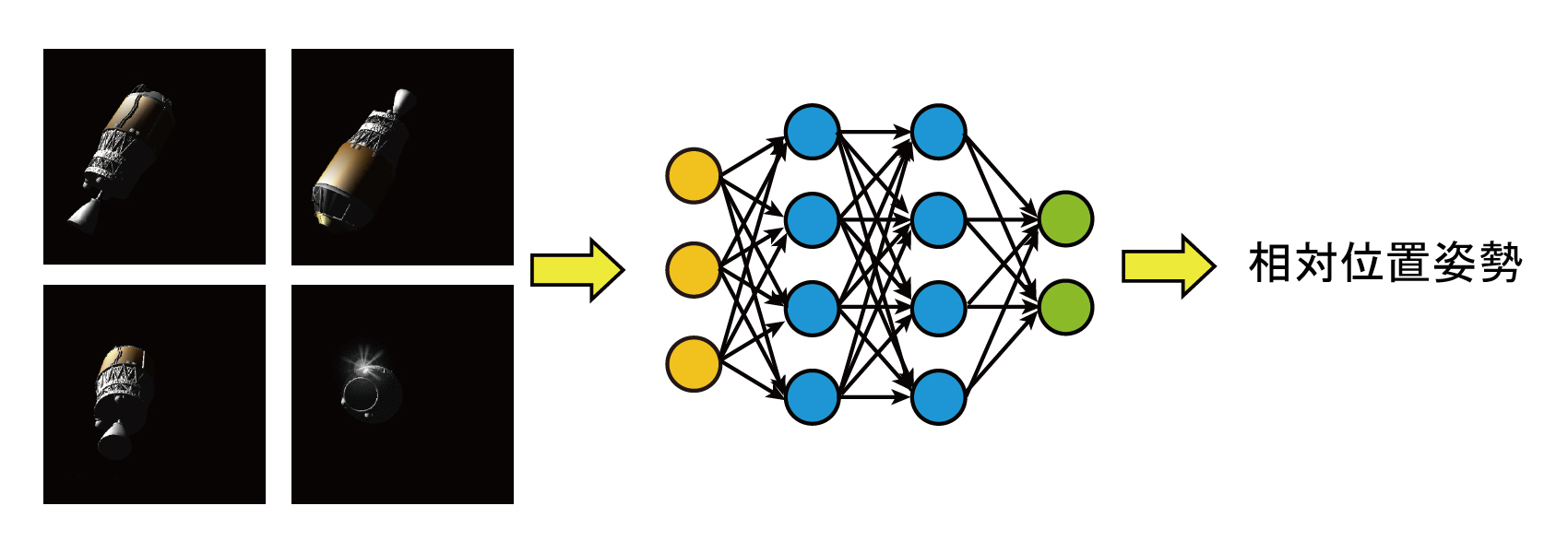
1つ目のアプローチは、画像航法技術です。デブリをカメラで撮像し、画像処理により、その位置・姿勢を推定します。距離に応じて必要な情報やデブリの見え方は変化するため、手法にも切り替えが必要になります。比較的遠い距離ではニューラルネットワークなどを用いて、太陽光の反射や陰影がある場合にも安定して位置・姿勢を推定します(図1)。
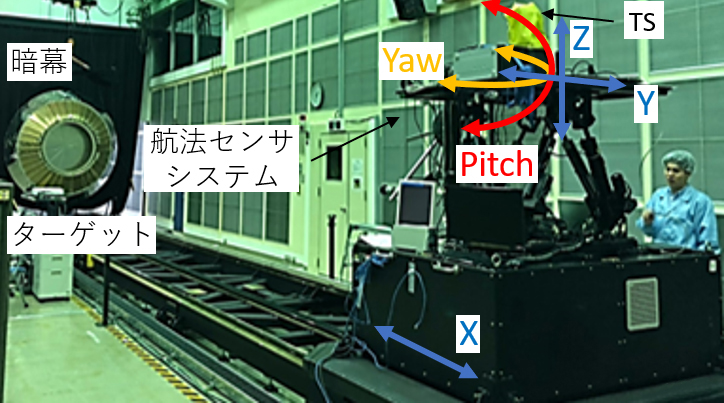
画像処理で推定した結果を用いて、数十分後のデブリの運動を高精度に予測し、予測結果をもとにデブリに接近する軌道を計算します。極近傍では、ステレオ処理等を用いて高速・高頻度な位置・姿勢計測を行い、精度のよい接近制御を実現します(図2)。
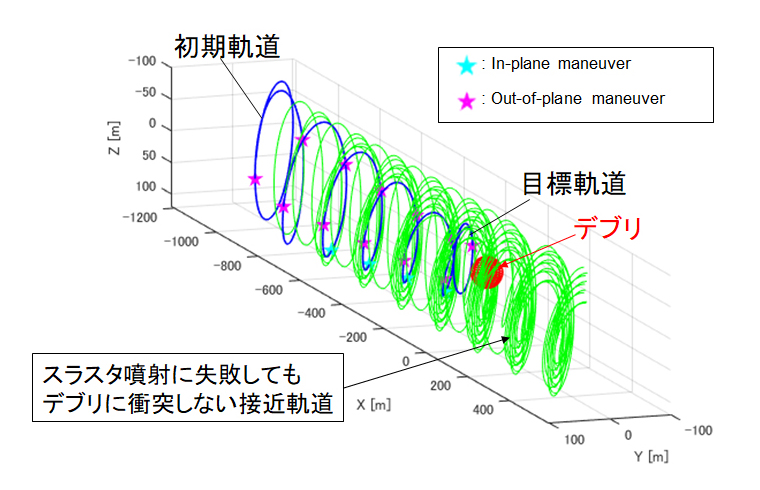
2つ目のアプローチは、安全な軌道設計技術です。宇宙ステーション等と比較してデブリでは位置計測の確実性が低いことを前提として、捕獲衛星側でトラブルが発生してもデブリと衝突する可能性の低い軌道を設計し、それに沿った接近を行います。図3はそのような軌道設計の例です。スラスタの噴射に失敗したとしても、デブリの周りをスパイラル状に飛行し、衝突することなく通過する安全な軌道を示しています。
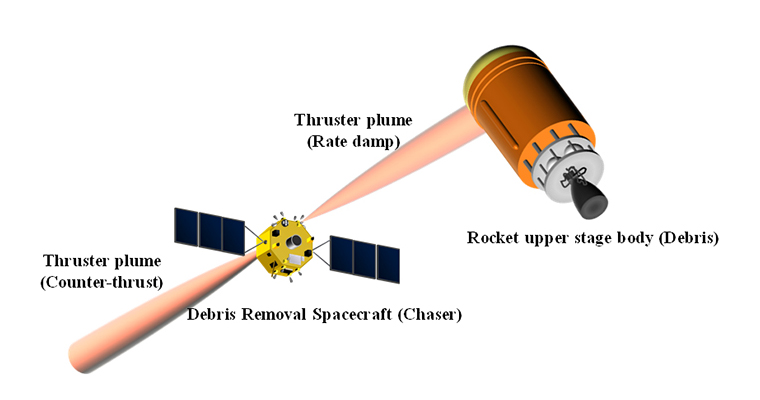
また、捕獲対象が回転しており捕獲が難しい問題への対処として、その回転速度を非接触で低減する方法を研究しています。具体的には、図4のように、デブリに対して、衛星搭載スラスタのプルーム(噴流)を適切に当てることにより、デブリの回転が止まる方向に力を与えます。プルームが押す力・トルクは、数値流体力学(CFD)により計算します。この方法により、デブリに接触することなく、回転速度を低減することができ、捕獲作業を容易にすることができます。
研究実績
発表論文
- Naomi Murakami, Toru Yamamoto, “Rendezvous Strategy for the Active Debris Removal Missions”, Space Debris Workshop, 2016.
- Toru Yamamoto, Naomi Murakami, Yu Nakajima, Koji Yamanaka, “Navigation and Trajectory Design for Japanese Active Debris Removal Mission”, 24th International Symposium on Space Flight Dynamics (ISSFD), Laurel, Maryland, 2014.
- Takahiro Sasaki, Yu Nakajima, Toru Yamamoto, "Rendezvous and Proximity Operations for Active Debris Removal Satellites Considering Trajectory Safety, " 43rd Annual AAS Guidance, Navigation and Control Conference, Breckenridge, Colorado, 2020.
- I. Takahashi, H. Kato, T. Yamamoto, M. Hayashi, S. Kawamoto, and H. Takahashi, “Motion Estimation of Axial Symmetry Object for Active Debris Removal Mission”, i-SAIRAS2018.
- D. Hirano, H. Kato, and T. Saito, “Deep Learning based Pose Estimation in Space”, i-SAIRAS2018.
- Shintaro Hashimoto, Daichi Hirano, Naoki Ishihama, “6-DoF Pose Estimation for Axisymmetric Objects Using Deep Learning with Uncertainty”, 2020 IEEE Aerospace Conference.
- Yu Nakajima, Shinji Mitani, Hiroumi Tani, Naomi Murakami, Toru Yamamoto, and Koji Yamanaka, "Detumbling Space Debris via Thruster Plume Impingement", AIAA/AAS Astrodynamics Specialist Conference, AIAA SPACE Forum, AIAA 2016-5660, 2016.
- Yu Nakajima, Hiroumi Tani, Toru Yamamoto, Naomi Murakami, Shinji Mitani, and Koji Yamanaka, "Contactless Space Debris Detumbling: A Database Approach Based on Computational Fluid Dynamics", Journal of Guidance, Control, and Dynamics, Vol. 41, No. 9 (2018), pp. 1906-1918, June 26, 2018.
- Yu Nakajima, Hiroumi Tani, Shinji Mitani, and Toru Yamamoto, " Efficiency Improving Guidance for Detumbling of Space Debris Using Thruster Plume Impingement", IEEE Aerospace Conference, Big Sky, Montana, 2020.