


Overview of research
Reducing the weight and volume of the equipment (including sensors and actuators) necessary for attitude control to the greatest possible extent is effective in reducing the size and cost of a satellite and saving its space.
This research also covers the research and development of a small module that can be mounted onboard a satellite as a package consisting of wheels and gyroscopes.
Not only realizing more compact and lightweight satellites, the research also aims for applications in various fields.
Research Videos
Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module (2:01)
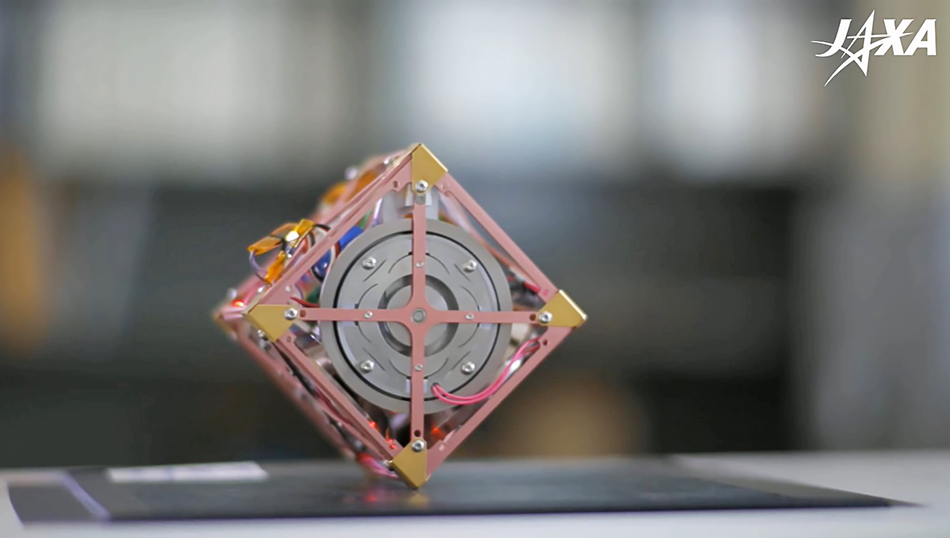
Demonstraition movie of a 100-mm size unit (0:29)
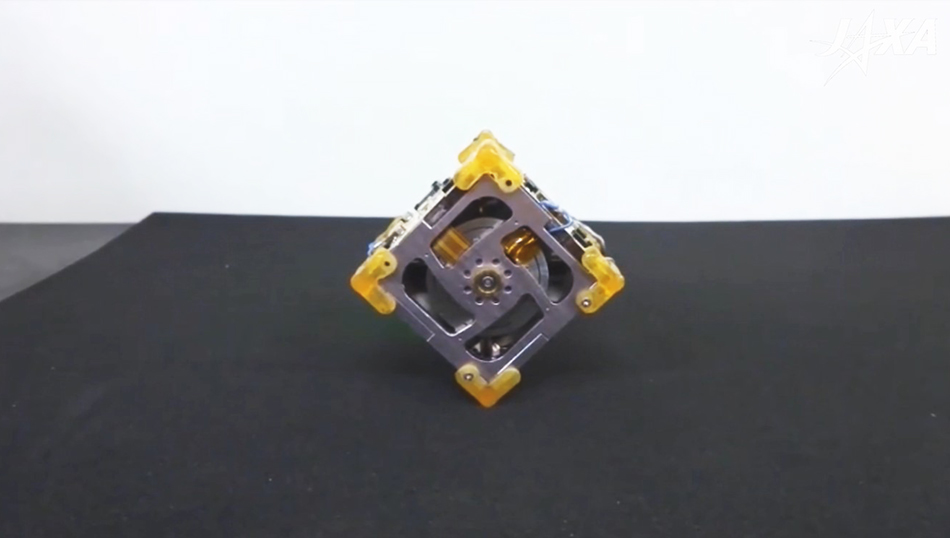
Demonstraition movie of a 31-mm size unit (1:07)
※In some browsers, contents may not display correctly.
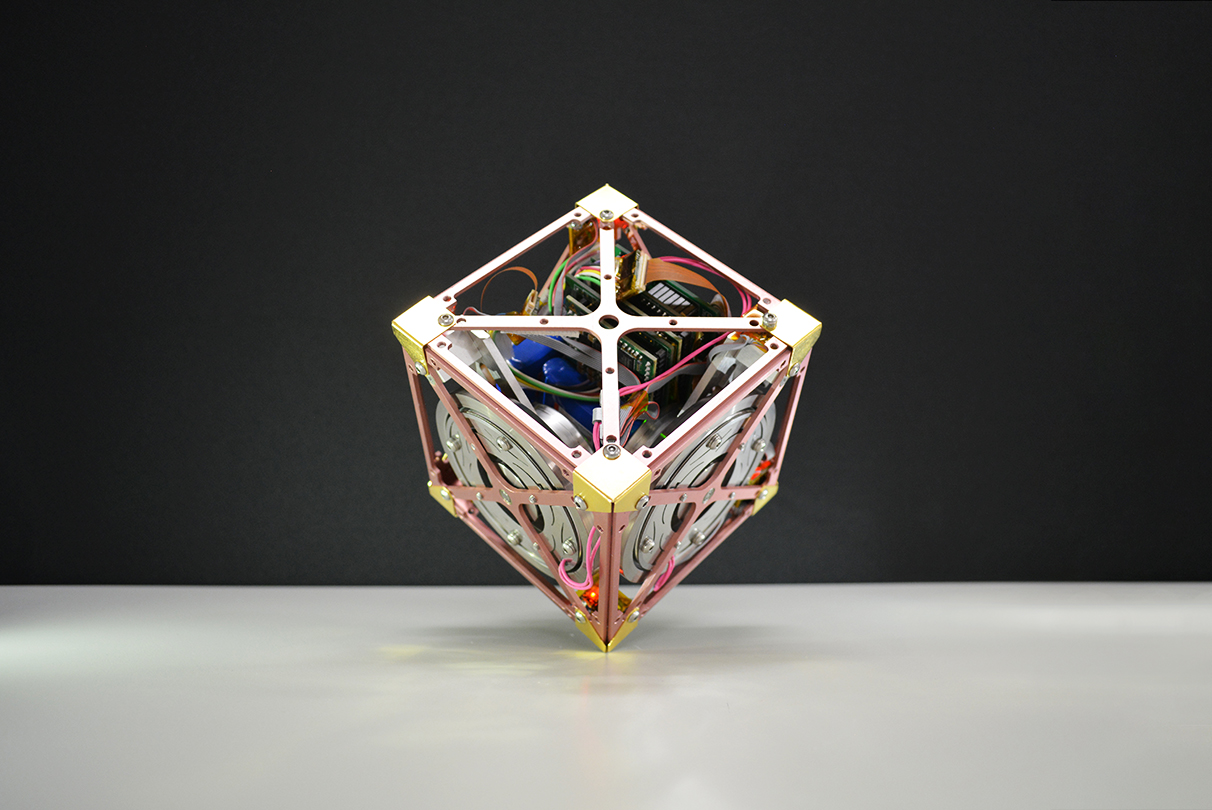
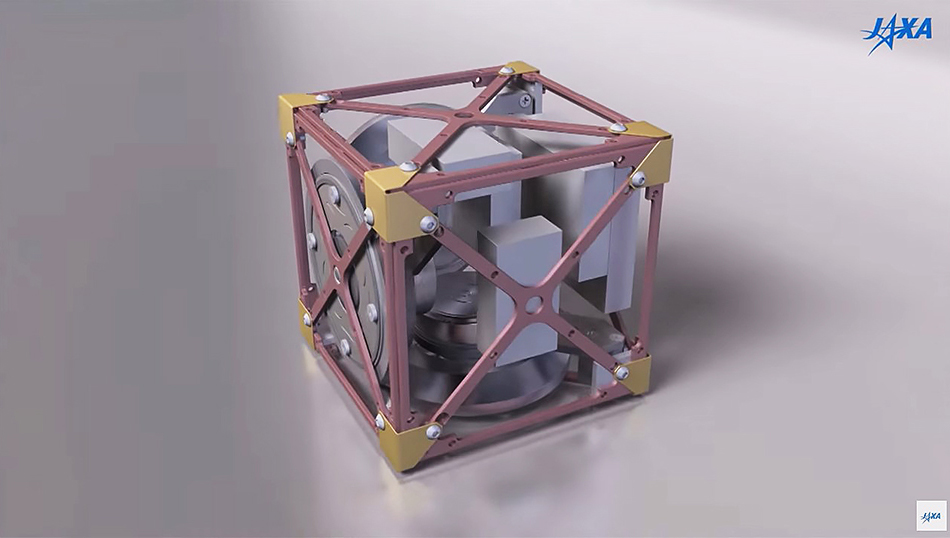
Overview of the Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module
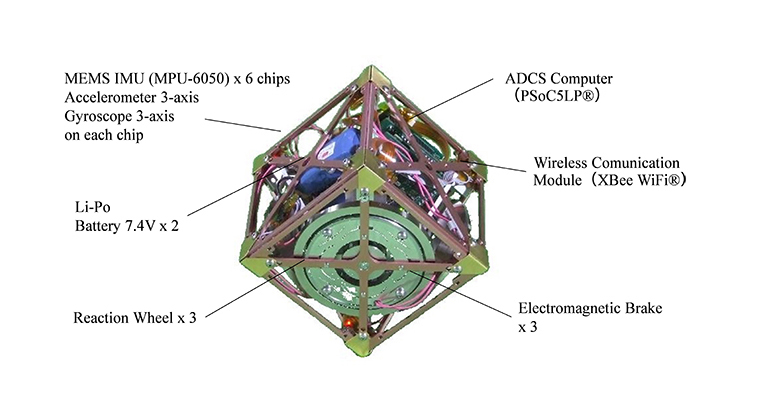
- The realized body only weighs a total of 1.34 kg (including a wireless communicator and a battery), and measures 10×10×10 cm3 in size.
- Arranging six IMU sensors (each sensor capable of measuring 3-axis rate and acceleration) on the module’s vertexes have improved attitude estimation accuracy.
- The 3-axis wheels use brushless DC motors and the hall sensors built into the motors measure wheel rotational speed.
- Each wheel axis is equipped with a newly developed thin electromagnetic brake.
- The control computer equipped with a system-on-chip (PSoCR) controls and measures at a 50-Hz cycle.
- The electromagnetic brake generates 2.1 Nm of braking torque at excitation and reduces the wheel rotational speed from 6000 rpm to zero within 100 ms, including demagnetization time.
- The module also includes a wireless communicator for receiving telemetry data and transmitting commands, and small lithium polymer battery.
Applications of the Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module
- 3-axis attitude controller for small satellite
- Exploration rover on microgravity asteroids
- Attitude stabilizer for Drone
- Modular Robots in Multi-agent System
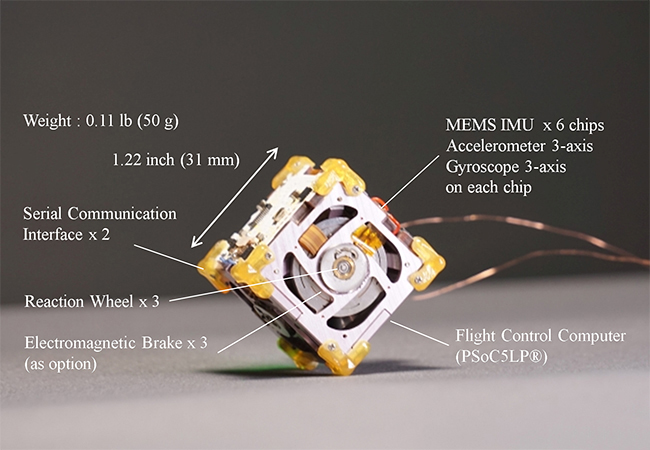
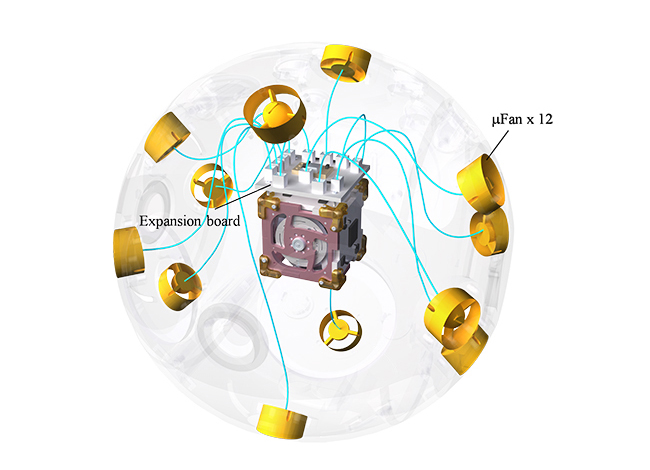
The technology developed for the Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module is fully demonstrated in the module, realizing both minimum weight and size (i.e. approx. 50 g including its guidance control computer, 6-axis inertial sensors, 3-axis wheels 31 mm in angular size). Its micro fan function of translational control can be extensionally equipped.
Publications
- Mitani, Shigeto, Kanzawa and Yamanaka, “Study of Miniaturized Three-axis Attitude Control Module,” 59th Space Sciences and Technology Conference, Kagoshima, 2015
- Mitani, Shigeto, Kanzawa and Yamanaka, “High-Agility、 Miniaturized Attitude Control Sensors and Actuators in an All-in-one Module,” ISTS30 Special Issue, Vol. 14 (2016) No. ists30
- Kato, Tanishima, Yanagase, Tsumaki and Mitani, "Control of Rocket-propelled Miniature Exploration Robot," ICRA, Singapore, 2017
- Mitani, Goto, Konomura, Shoji and Hagiwara, "Crew-supportive Autonomous JEM Internal Ball Camera Robot," 61th Space Sciences and Technology Conference, Niigata, 2017
- Shigeto, Mitani, Tanishima and Goto, "Development of the 1/30 U Size Attitude Control Sensors and Actuators in an All-in-one Module and its Application Study of the JEM Internal Ball Camera," 61th Space Sciences and Technology Conference, Niigata, 2017
- Tanishima, Mitani, Shigeto, Matsumoto and Goto, "Proposed Ground Verification Strategy for the JEM Internal Camera Robot's Control System," 61th Space Sciences and Technology Conference, Niigata, 2017
- Matsumoto, Mitani, "Study of Obstacle Avoidance Problem for JEM Internal Camera Robot," 61th Space Sciences and Technology Conference, Niigata, 2017
- Shigeto, Mitani, Tanishima and Goto, "Development and evaluation of the 1/30U small-sized 3-axis attitude control module, and its application for the JEM Internal Ball Camera Robot", Proc. of 32nd AIAA/USU Conference on Small Satellites, 2018.
- Mitani, Goto, Konomura, Shoji, Hagiwara, Shigeto and Tanishima, "Crew-supportive Autonomous Mobile Camera Robot on ISS/JEM," i-SAIRAS 2018.
- Tanishima, Mitani, Shigeto, Matsumoto, Arai, Goto and Suzuki, "Effective and Accurate Method for Ground and On-orbit Verification of Control Systems for Free-flying Robot with Low Thrust Force," i-SAIRAS 2018.