ロケットエンジン駆動形ロボットの研究
これまでの月や火星など重力天体の探査ロボットといえばローバ型(車両型)でした。これらは移動能力に優れ、たくさんの科学機器を運搬するのに適した形状ですが、平坦な地形しか踏破できない問題がありました。 しかし、月南極のシャックルトンクレータや、最近JAXAによって発見された縦孔(地下空洞)、火星のマリネリス峡谷など、興味深い探査地点は谷底や崖の上などローバ型ロボットでは到底踏破できない場所にも多くあります。
こうした場所の探査を最小限の質量で実現するために、ロケットエンジン飛翔形ロボットの研究を行っています。このロボットはロケットエンジンを用いているため、質量比で移動能力は最も効率がよいです。 しかも、移動方法は、地形条件に依存しないうえに高速・長距離移動ができ、さらに、3ステップの移動方法(図1)(図2)による移動でピンポイントに所望のサイトに到達できるので、本当に行きたい場所における科学観測を実現できます。
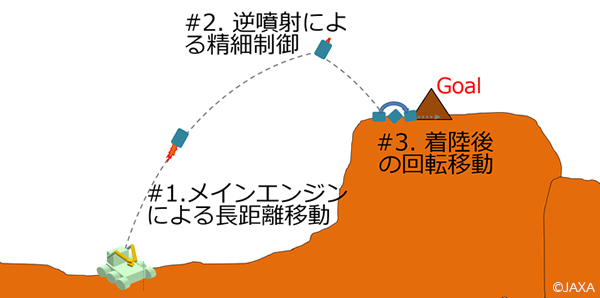 図1:3ステップの移動方法
図1:3ステップの移動方法 図2:精細飛翔距離制御軌跡
図2:精細飛翔距離制御軌跡参考文献
- Hiroki Kato, Nobutaka Tanishima, Keiichi Yanagase, Toshimichi Tsumaki, and Shinji Mitani. (2017) “Distance Control of Rocket-propelled Miniature Exploration Robot.”, IEEE International Conference on Robotics and Automation (ICRA), Singapore, 2017, pp. 6397-6403.
- Nobutaka Tanishima, Hiroki Kato, Toshimichi Tsumaki, Keiichi Yanagase. “Rocket-propelled exploration robot: Shooting Scouter, concept and evaluation of flight dynamics.”, IEEE Aerospace Conference, Big Sky, MT, 2017, pp. 1-7.
