高速姿勢マヌーバ技術の研究
地球観測衛星(特に災害監視ミッション)や天文科学衛星が、多数の観測目標を効率よく観測するためには、衛星の姿勢を目標方向に変更する姿勢マヌーバに、俊敏性(アジリティ)が要求されます。 そのため、コントロールモーメントジャイロ(CMG)を用いた高速姿勢マヌーバ技術の研究が必要になります。
研究の概要
 CMGを用いたマヌーバ試験
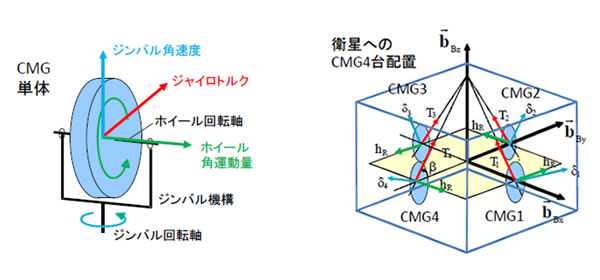
CMGを用いたマヌーバ試験コントロールモーメントジャイロ(CMG)は、従来、姿勢制御用アクチュエータとして使われているリアクションホイール(RW)に比べて、高いトルクを発生可能であるため高速姿勢マヌーバに有効なアクチュエータです。 一方で、RWに比べて駆動方法が複雑となるため、アルゴリズム(制御則・駆動則)についての検討が必要です。第一研究ユニットでは、高いアジリティ性能を有する衛星を実現することを目標として、高速姿勢マヌーバ技術の研究を実施しています。 CMGを高速姿勢マヌーバに適用する際の実際的な観点からアルゴリズムの課題を解決するため、解析・数値シミュレーションによる検討や、アルゴリズム検証を目的としたマヌーバ試験を実施しています。
研究成果(より詳細な研究内容)
地球観測衛星(特に災害監視ミッション)や天文科学衛星が、多数の観測目標を効率よく観測するためには、衛星の姿勢を目標方向に変更する姿勢マヌーバに、俊敏性(アジリティ)が要求されます。 コントロールモーメントジャイロ(CMG)は、従来、姿勢制御用アクチュエータとして使われているリアクションホイール(RW)に比べて、高いトルクを発生可能であるため高速姿勢マヌーバに有効なアクチュエータです。 一方で、ある軸まわりにトルクを発生できない「特異点」に陥ることがあり、RWに比べて駆動方法が複雑となるため、特異点回避を含めたアルゴリズム(制御則・駆動則)についての検討が必要です。
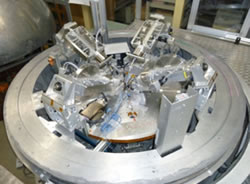
第一研究ユニットでは、将来、姿勢角速度3deg/s以上の高いアジリティ性能を有する衛星を実現することを目標として、高速姿勢マヌーバ技術の研究を続けています。CMGを高速姿勢マヌーバに適用する際の実際的な観点から、 アルゴリズムの課題を解決する研究を解析・数値シミュレーションにより実施しています。また、衛星の3軸自由な姿勢運動を模擬することができる空気浮上式の試験装置(ダイナミクスシミュレータ)を開発し、アルゴリズム検証を目的としたマヌーバ試験を実施しています。