概要
小型実証衛星1型(SDS-1)について
目的
- 実用衛星等に載せるには開発リスクが高く、技術ロードマップ上重要・緊急な技術の実証を目的とする。
- また、SDSの開発を通じてJAXA技術系職員の人材育成を行う。
実証対象
- 上記目的に合致する部品・コンポーネントおよびセンサー技術。
実証候補の選定基準(実証の必要性)
- 宇宙でしか得られない環境の評価を必要とするもの(微小重力環境、広大な空間、広い視野、複合環境など)。
- 地上の試験、解析では理論的には実証可能であっても、検証がせいやくされるためにリスクが残るものについて、総合的なシステム検証を軌道上で行い、リスクを最小化することが求められるもの。
| 項目 | 主要諸元 |
|---|---|
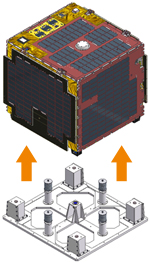
| 様式構造 | BOX構造 |
| 打ち上げ時期 | 2008年度(2009年1月23日) |
| 打ち上げ方式 | GOSAT相乗りピギーバック方式 |
| 質量 | 約100kg(分離機構を含まず) |
| 形状・サイズ | 箱型 約 70cm(W)×70cm(D)×60cm(H) |
| 太陽電池パネル | 2枚 |
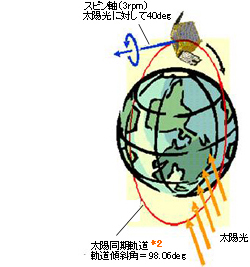
| 投入軌道 | 太陽同期軌道 降交点地方時:13時 軌道高度:666km 軌道傾斜角:98.06° |
| 姿勢*1 | 定常時:スピン安定 ミッション時:簡易三軸姿勢制御 |
| 通信 | Sバンド帯 |
*1人工衛星は、衛星全体をコマの様に回転させたり(スピン安定)、衛星内部に設置したホイールを回転させたり加減速することで衛星本体の回転を停止させて簡易的に三軸まわりの姿勢変動を低減(簡易三軸姿勢制御)する。
*2太陽同期軌道:太陽に対して、衛星軌道面が常に同じ角度をとる軌道。太陽同期軌道を回る衛星から地球を見ると、地球に当たる太陽光線が一定の角度になる。
*2太陽同期軌道:太陽に対して、衛星軌道面が常に同じ角度をとる軌道。太陽同期軌道を回る衛星から地球を見ると、地球に当たる太陽光線が一定の角度になる。
ピギーバック衛星の分離(SDS-1の場合)
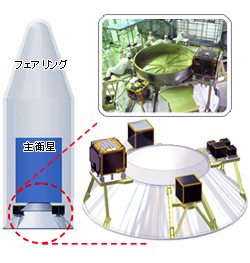
1.主衛星GOSAT分離後に
衛星BUS ON
2.ロケットコマンドによる
衛星分離

3.地上からのコマンドによる
太陽電池パネル展開
若手職員によるインハウス作業
SDS-1では、JAXAの若手技術者が主体となってシステム熱構造解析などのシステム設計解析、組み立て、バス機器*3の環境試験、システム熱平衡試験および振動試験などを行いました。

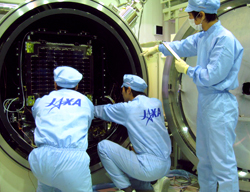
*3 バス機器 :通信系、電源系、姿勢制御系など、衛星のミッションをサポートするための機器。