


Overview of research
Safe and reliable methods to rendezvous with space debris are essential for removing the debris. JAXA has built technology for safe and reliable rendezvous with the International Space Station (ISS) throughout the development of the H-2A Transfer Vehicle (KONOTORI), a resupply spacecraft for the ISS. This technology can be applied to rendezvous with space debris.
However, there are technical difficulties unique to space debris. Since the ISS was designed to rendezvous with other spacecraft, there are several laser reflectors and communication devices on the ISS, and its attitude can be controlled for rendezvous with other spacecraft. On the contrary, space debris generally consists of used rockets or non-operational satellites that have finished their missions. They have no laser reflectors or operational communication devices and have lost their attitude control capability, which could help rendezvous. For these reasons, debris-removal spacecraft need navigation technology, the ability to estimate the accurate position and attitude of debris, prior to rendezvous. Moreover, the spacecraft will have to approach and capture rotating debris, which is much far more difficult than capturing a stable target. JAXA is developing technologies to overcome those difficulties.
Guidance, navigation, and control technologies are developed by two approaches.
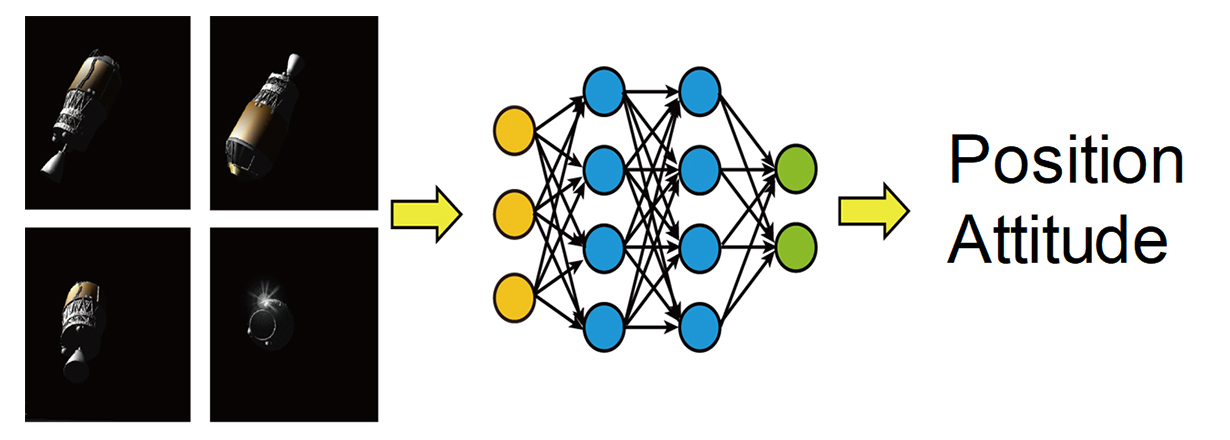
The first approach is image-based navigation in which a camera captures an optical image which is used to determine an object's position and attitude through image processing. There are several image processing approaches that are switched according to the approaching phase, since the image of debris changes with relative distance. A neural network was adopted for relatively distant processing to overcome strong reflections and shadows caused by sunlight. (Fig. 1)
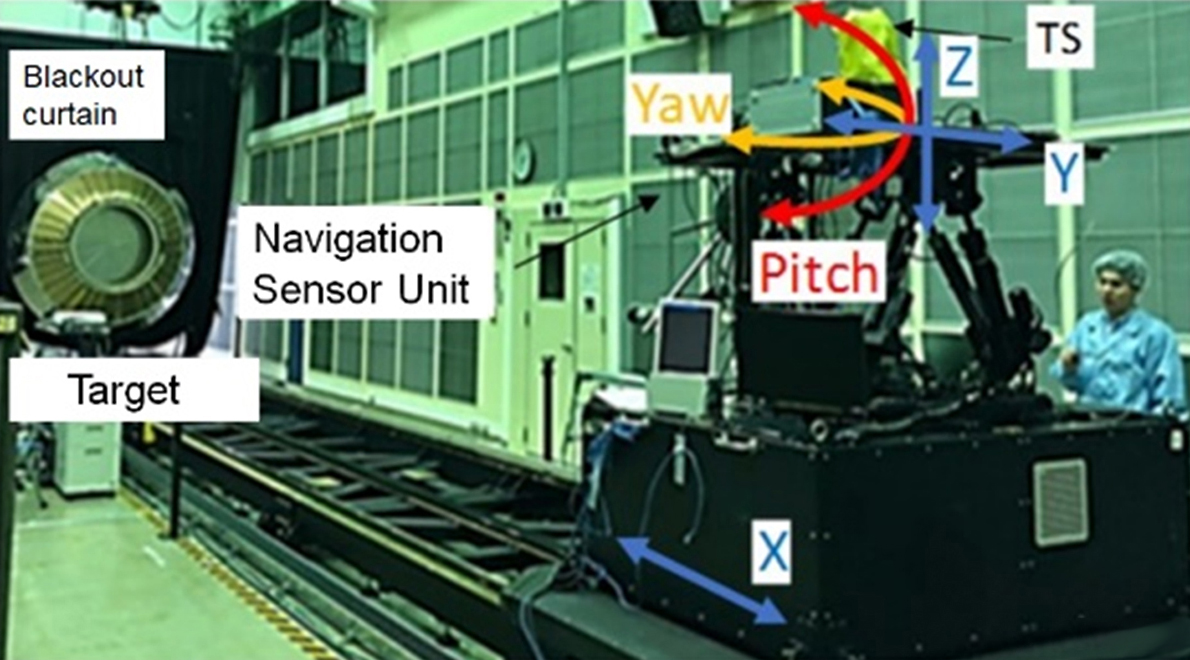
The estimated results are propagated for several tens of minutes to predict the future position and attitude of the debris. According to the predicted results, the spacecraft determines an approach trajectory. In a proximity operation, more frequent estimation of position and attitude is required, so the position and attitude are obtained through a simple, fast calculation such as stereo vision method to approach safely. (Fig. 2)
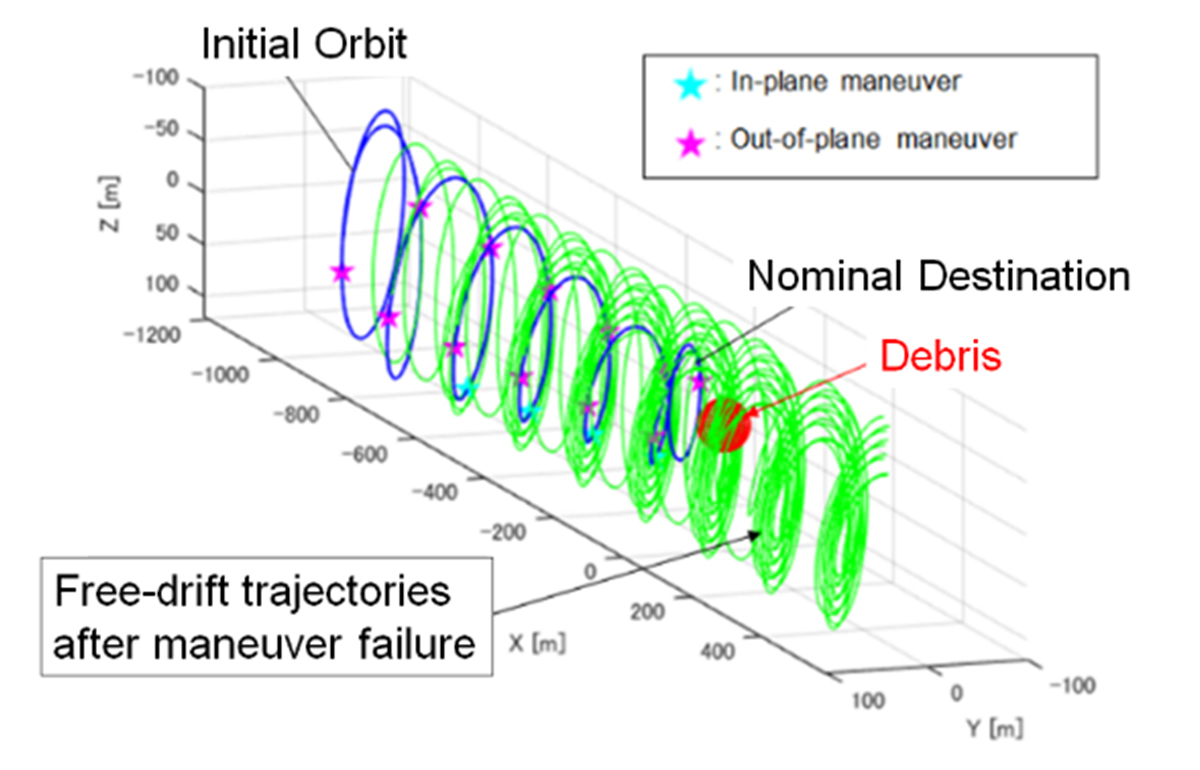
The second approach is a safe trajectory design. Compared to the ISS, the position of the debris can be obtained with lower precision. Under the assumption, safe approach trajectory with a low risk of collision is designed even if the debris-removal spacecraft has small errors. Figure 3 is an example of safe trajectories. Even if the spacecraft cannot burn the thruster at the planned time, the spacecraft maintains its spiral motion and passes the debris at a safe distance.
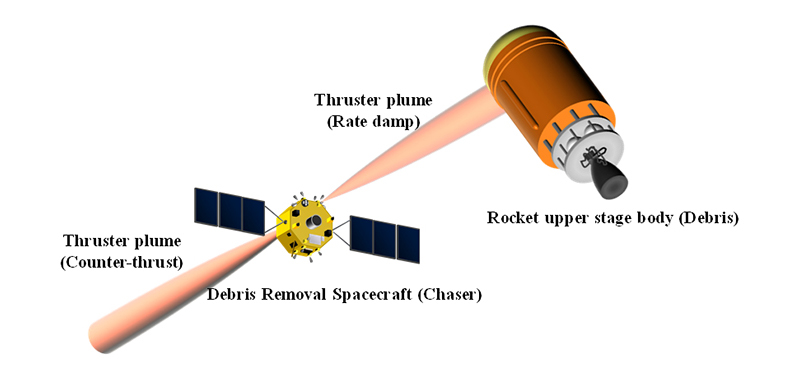
For rotating debris, the rate damping approach without mechanical contact is being researched. The spacecraft induces torque on the debris by a thruster plume impinging during the proximity operation. (Fig. 4) The thruster plume force and torque are calculated using Computer Fluid Dynamics (CFD), which requires no dedicated device to slow down the rotation, and the rotation can be reduced from a distance, which reduces the risk of collision during the operation.
Research achievements
Publications
- Naomi Murakami, Toru Yamamoto, “Rendezvous Strategy for the Active Debris Removal Missions”, Space Debris Workshop, 2016.
- Toru Yamamoto, Naomi Murakami, Yu Nakajima, Koji Yamanaka, “Navigation and Trajectory Design for Japanese Active Debris Removal Mission”, 24th International Symposium on Space Flight Dynamics (ISSFD), Laurel, Maryland, 2014.
- Takahiro Sasaki, Yu Nakajima, Toru Yamamoto, "Rendezvous and Proximity Operations for Active Debris Removal Satellites Considering Trajectory Safety, " 43rd Annual AAS Guidance, Navigation and Control Conference, Breckenridge, Colorado, 2020.
- I. Takahashi, H. Kato, T. Yamamoto, M. Hayashi, S. Kawamoto, and H. Takahashi, “Motion Estimation of Axial Symmetry Object for Active Debris Removal Mission”, i-SAIRAS2018.
- D. Hirano, H. Kato, and T. Saito, “Deep Learning based Pose Estimation in Space”, i-SAIRAS2018.
- Shintaro Hashimoto, Daichi Hirano, Naoki Ishihama, “6-DoF Pose Estimation for Axisymmetric Objects Using Deep Learning with Uncertainty”, 2020 IEEE Aerospace Conference.
- Yu Nakajima, Shinji Mitani, Hiroumi Tani, Naomi Murakami, Toru Yamamoto, and Koji Yamanaka, "Detumbling Space Debris via Thruster Plume Impingement", AIAA/AAS Astrodynamics Specialist Conference, AIAA SPACE Forum, AIAA 2016-5660, 2016.
- Yu Nakajima, Hiroumi Tani, Toru Yamamoto, Naomi Murakami, Shinji Mitani, and Koji Yamanaka, "Contactless Space Debris Detumbling: A Database Approach Based on Computational Fluid Dynamics", Journal of Guidance, Control, and Dynamics, Vol. 41, No. 9 (2018), pp. 1906-1918, June 26, 2018.
- Yu Nakajima, Hiroumi Tani, Shinji Mitani, and Toru Yamamoto, " Efficiency Improving Guidance for Detumbling of Space Debris Using Thruster Plume Impingement", IEEE Aerospace Conference, Big Sky, Montana, 2020.