


Overview of research
To solve the space debris problem, removing large debris from congested orbit is required, and capturing technology is necessary to realize this. Research and development of this technology will not only contribute to the space debris problem, but will lead to the technology acquisition of on-orbit services, such as maintaining and recycling spacecraft on orbit.
The rendezvous docking technology that was developed for the H-II Transfer Vehicle (Kounotori) to resupply the International Space Station (ISS) can be applied to the capture of space debris. However, since space debris is generally an uncooperative object that cannot be safely captured with the Kounotori scheme, new technical issues arise:
- Space debris has no docking port to capture.
- Larger position and attitude errors between space debris and the removal satellite.
JAXA is researching and developing technologies to solve such technical issues to enable the capture of large space debris.
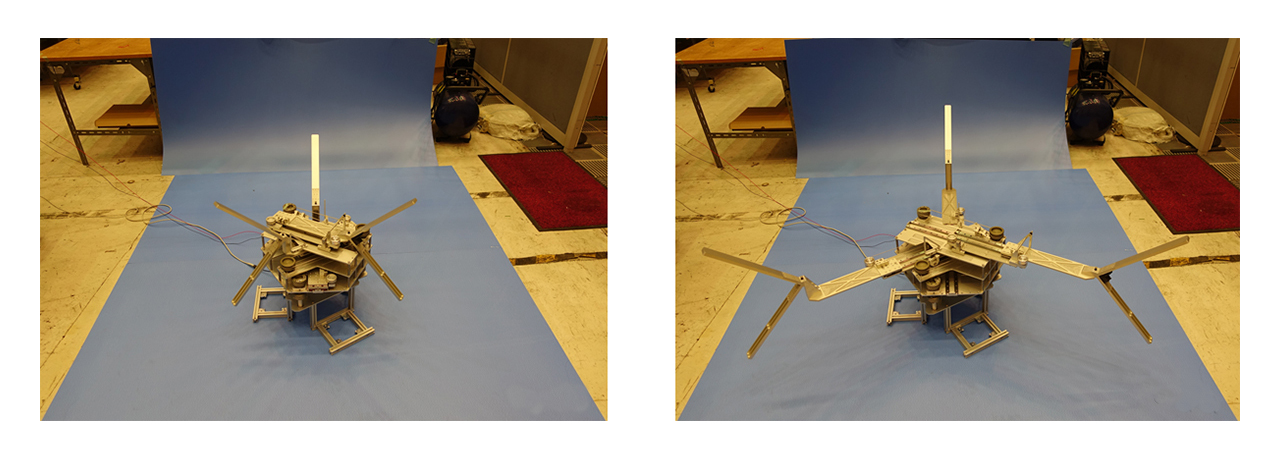
Figure 1 is the end-effector test model to capture the upperstage of a rocket that became debris. The rockets commonly have a PAF (Payload Adapter Fitting), to connect the satellite and rocket during launch, as shown in Figure 2.
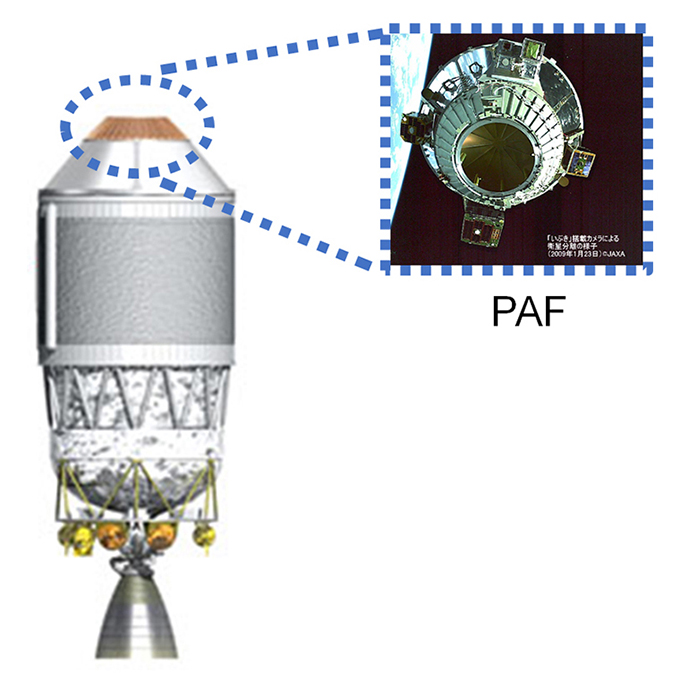
Payload Adapter Fitting (PAF)
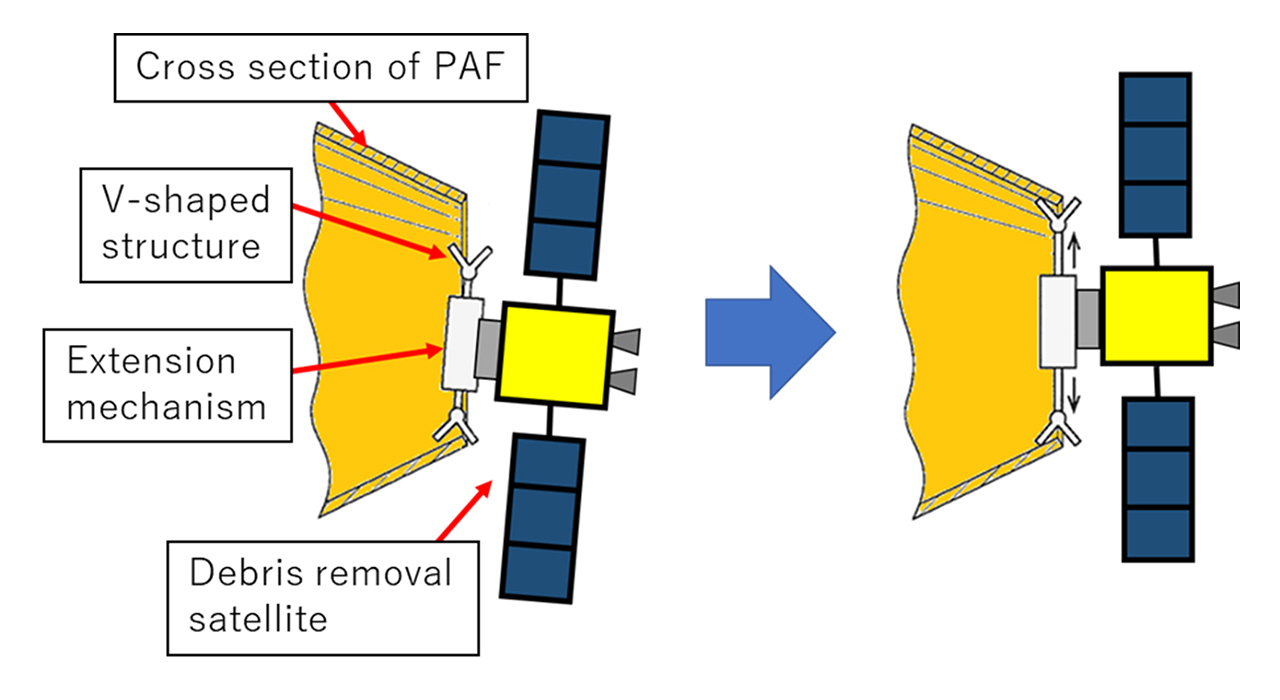
The end-effector test model has V-shaped structures at the ends of extensional booms that are driven by a wire actuation mechanism, which captures the PAF by inserting and activating the mechanism inside the PAF as shown in Figure 3. This technology solves the technical issues of capturing un-cooperative targets and aims at capturing large space debris.
In addition, JAXA also conducts research on compliance control, as well as other capture technologies.
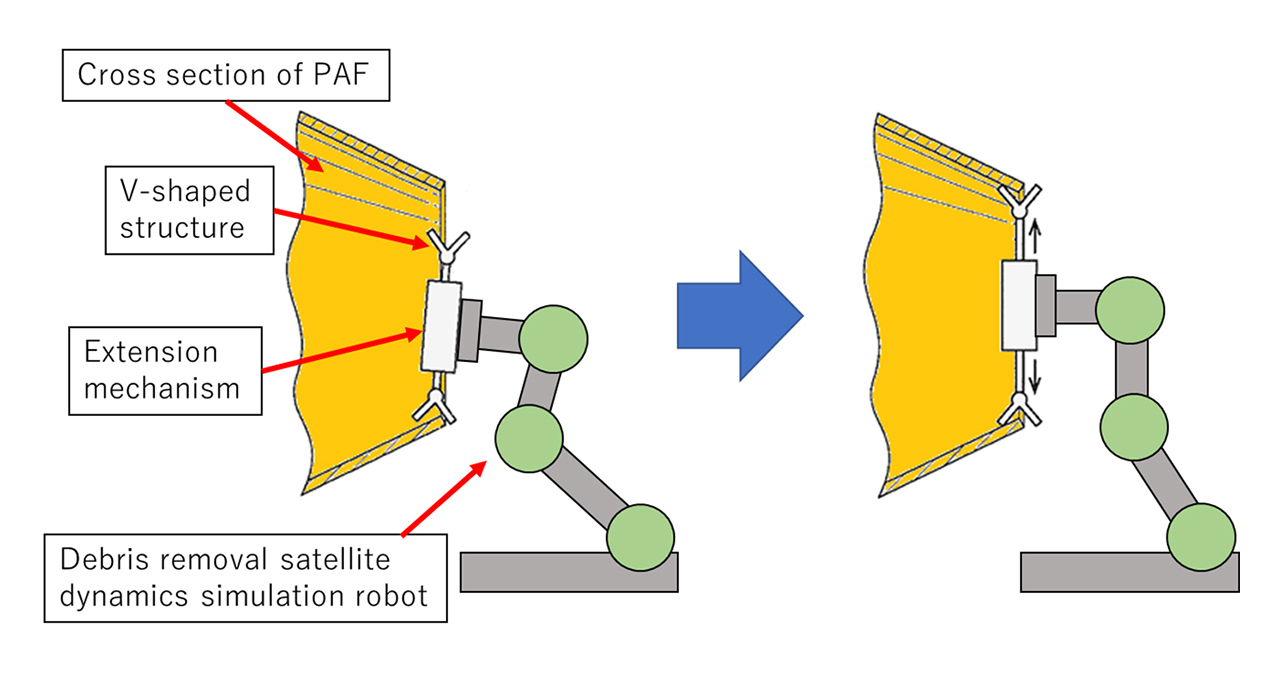
Capturing technology is not only an end-effector’s technology but also includes research and development of test facilities to verify the end-effector functions and to simulate what will happen during debris capture.
JAXA is researching and developing the facility to reproduce the relative motions of two objects in a zero-gravity environment using a motion simulator composed of robotic arms, as shown in Figure 4. JAXA plans to use this facility to research and test various capturing methods, including end effectors, as shown in Figure 1.
Research achievements
Publications
- Nobutaka Tanishima, Hiroyuki Okamoto, Kentaro Iki, KeisukeWatanabe, Teppei Okumura, Hiroki Kato, Masato Hayashi, and Daichi Hirano. ”Concept and Design of the Caging-Based Debris Gripper for PAF Capturing”, 1st International Orbital Debris Conference, Houston, 2019.
- Nobutaka Tanishima, Daichi Hirano, Tsumaki Toshimichi, Hiroki Kato, " Concept and Mechanism of the Tendon Actuated Versatile Debris Gripper", in Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO), 2017, pp. 2129-2135.
- Daichi Hirano, Hiroki Kato, Tatsuhiko Saito, "Online Path Planning and Compliance Control of Space Robot for Capturing Tumbling Large Object", in Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018.
- Hiroki Kato, Daichi Hirano, Jun Ota, "Collision-based Contact Mode Estimation for Dynamic Rigid Body Capture", in Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Brisbane, 2018, pp. 881-888.
- Daichi Hirano, Yu Nakajima, Hiroki Kato, Takahiro Nozaki and Kouhei Ohnishi, “Reaction Force Observer for a Free-Floating Robot”, in Proceedings of International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), Madrid, 2018, pp. 881-888.
- K. Shibasaki, W. Oobayashi, et. al.. “Conceptual study of Mechanical and Sensing System for Debris Capturing for PAF”, Proceedings of the 7th Space Debris Workshop, JAXA, pp.271-288, 2016.
- T. Mataki, Y. Akahoshi, T. Koura, Y. Kitazawa, K. Shimamura, T. Izumiyama, K. Hashimoto, S. Kawamoto, J. Aoyama, T. Fukuta, “Evaluation of Harpoon Tips for Debris Capture”, Trans. JSASS Space Tech. Japan Vol. 14 (2016) Issue ists30 Pages Pr_33-Pr_37.
- Keisuke Taga, Hiroki Nakanishi, Daichi Hirano, “Development of Space Debris Gripper Mechanism using link singularity and Spring”, Robotics and Mechatronics Conference 2019.