



カメラ撮影に係るクルーリソースを省力化する技術(Int-Ball/Int-Ball2)
宇宙飛行士の作業時間の約10%程度を占めている撮影作業を、地上からの遠隔操作カメラロボットによって代替する研究開発を進めています。
2017年にJAXA初の移動型カメラである「JEM自律移動型船内カメラ(Int-Ball(イントボール))」の実証に成功しました。
今後はInt-Ballの更なる性能向上・機能拡張を図り、「きぼう」船内外実験の自動化・自律化を進めると共に、将来探査ミッション等に利用可能なロボティクス技術の獲得を目指します。
詳しくはこちら:Int-Ball2自律飛行と自動ドッキング実証実験に成功
詳しくはこちら:きぼう船内ドローン「Int-Ball」からの映像初公開!
宇宙船内の貨物搬送を無人で行う技術(カーゴハンドリング)
将来有人宇宙拠点(Post-ISSやGatewayを含む月探査)において拠点無人運用化及び利用の成果最大化を可能とする自動化自律化技術を実現することを目指しています。
その一環として、宇宙船内の貨物搬送を無人で行う技術実証をISS船内で実施することを検討中です。
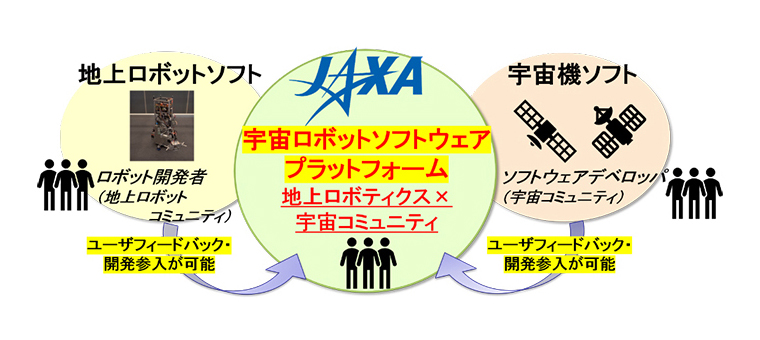
民間ロボット研究者の参入を促す宇宙機ソフトウェア環境の研究(RACS)
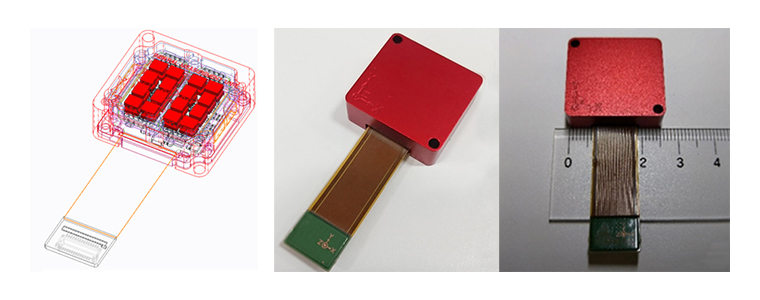
人工衛星の小型化や低コスト化を目指す技術
超小型三軸姿勢制御
マルチIMU方式による慣性センサの高精度化